Pracownia Nauki Programowania i Aplikacji Robotów Przemysłowych
W ramach projektu zostało zakupione wyposażenie do Laboratorium Nauki Programowania i Aplikacji Robotów Przemysłowych. Jest to laboratorium doskonale i nowocześnie wyposażone, pozwalające w łatwy i przystępny sposób zapoznać się z najnowszymi światowymi trendami w dziedzinie robotyki. To laboratorium dostępne na wyciągnięcie ręki za sprawą licznych, przewidzianych w programach studiów, zajęć z programowania robotów przemysłowych prowadzonych w przystępny sposób przez wysoce wykwalifikowaną kadrę naukową. Wszystko to dostępne już dzisiaj na Wydziale Mechanicznym Politechniki Łódzkiej. W skład laboratorium wchodzą cztery nowoczesne stanowiska przemysłowe sprzężone ze sobą za pomocą przenośnika taśmowego.

Stanowisko pierwsze – Stanowisko zrobotyzowanej paletyzacji
W skład stanowiska wchodzą:
- robot o napędach elektrycznych typu DELTA (IRB 360 firmy ABB), 4 st. sw. z systemem wizyjnym wraz z instalacją i oprzyrządowaniem - 1 szt.
- Komputer przenośny do stanowiska zrobotyzowanej paletyzacji - 1 szt.
- Przenośnik taśmowy do stanowiska zrobotyzowanej paletyzacji - 1 szt.
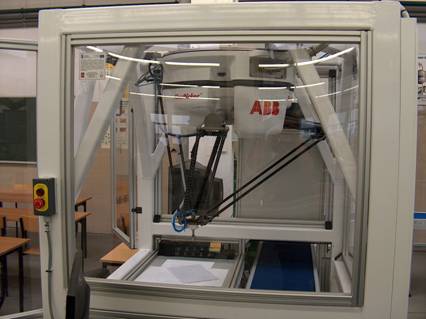

Pierwszym prezentowanym robotem jest IRB 360; robot typu Delta. Stanowisko to powstało w celu zaprezentowania studentom możliwości oferowanych przez robota o równoległej strukturze kinematycznej, tj. znacznej siły, wysokiej precyzji ruchów, dokładności pozycjonowania, a przede wszystkim zawrotnej prędkości z jaką może pracować - prędkości sięgającej 7000mm/s.
W trakcie zajęć studenci zapoznani zostaną z podstawami obsługi rzeczonego robota, przedstawione zostanie bogate środowisko, za pomocą którego robot zostanie zaprogramowany. Bogatsi o tę wiedzę studenci będą potrafili, bez najmniejszego problemu, stworzyć program, dzięki któremu robot zrealizuje stawiane przed nim najczęściej zadanie paletyzacji.
W ramach zajęć dla bardziej zaawansowanych do programu sterującego wprowadzone zostaną instrukcje ze zintegrowanego systemu wizyjnego, co umożliwi robotowi rozpoznawanie i chwytanie przedmiotów nadjeżdżających na przenośniku.
Stanowisko drugie –Stanowisko zrobotyzowanej obsługi gniazda wytwórczego
W skład stanowiska wchodzą:
- robot o napędach elektrycznych manipulacyjny Motoman (IA20),7 stopni swobody wraz z instalacją i oprzyrządowaniem - 1 szt.
- Komputer przenośny do stanowiska zrobotyzowanej obsługi gniazda wytwórczego - 1 szt.

Kolejnym prezentowanym robotem jest japoński IA20, firmy Motoman. W odróżnieniu od Delty charakteryzuje się szeregową strukturą kinematyczną, dzięki czemu jego manewrowość jest znacznie większa. Warto nadmienić, że robot ten wyposażony został w dodatkowy – nadmiarowy siódmy stopień swobody, co jest rzeczą nieczęsto spotykaną w tego typu urządzeniach. Powyższe cechy sprawiają, że możliwe staje się sprawne i efektywne operowanie końcówką roboczą w trudno dostępnych miejscach. Wszystko to w połączeniu z przyzwoitą maksymalna prędkością ruchów (1500mm/s) oraz bardzo prostym w obsłudze i niezwykle czytelnym środowiskiem programistycznym sprawia, że praca z robotem staje się bardzo przyjemna i może być opanowana w bardzo krótkim czasie.
Stanowisko trzecie – Stanowisko montażu zrobotyzowanego i nakładania powłok
W skład stanowiska wchodzą:
- robot Melfa o 6 st. sw. i napędach elektrycznych z kamerą i oprogramowaniem wraz z instalacją i oprzyrządowaniem - 1 szt.
- Komputer przenośny do stanowiska montażu zrobotyzowanego i nakładania powłok - 1 szt.
- Podajnik wibracyjny do stanowiska montażu zrobotyzowanego i nakładania powłok - 1 szt.
- Przenośnik taśmowy do stanowiska montażu zrobotyzowanego i nakładania powłok - 1 szt.

Stanowisko to prezentuje całkowicie odmienne podejście do zagadnienia programowania robotów przemysłowych. W jego skład wchodzi robot Melfa oraz magazyn końcówek roboczych; zainstalowane są one w środowisku wytwórczym stworzonym dla celów symulacyjnych. Pozwala ono zaprezentować pracę w pełni zautomatyzowanego stanowiska wytwarzającego powszechnie znane przedmioty użytku codziennego, w tym wypadku: listwy zasilające.
Zaawansowane środowisko programistyczne zaaplikowane w tym stanowisku umożliwia pełen dostęp do wszelkich funkcji zainstalowanych nań urządzeń, pozwala na zapoznanie studentów z ogromem oferowanych przezeń funkcji, a przede wszystkim daje przedsmak zawiłości zadań programistycznych na jakie może natknąć się w przyszłej pracy nasz Absolwent.
Oferowane przez stanowisko możliwości są bardzo imponujące: w trakcie kolejnych zajęć studenci nauczeni zostaną jak sprawnie zaprogramować stanowisko, tak aby robot, za pomocą wymienianych automatycznie końcówek roboczych, pobrał z niezależnie sterowanych podajników, przenośników czy uchwytów kolejne elementy składające się na konstrukcję montowanej listwy elektrycznej.
Stanowisko czwarte – Stanowisko obróbki za pomocą robota
W skład stanowiska wchodzą:
- robot IRB2400 o 6 st. sw. i napędach elektrycznych wraz z instalacją i oprzyrządowaniem - 1 szt.
- Komputer przenośny do stanowiska obróbki za pomocą robota - 1 szt.
- Czujnik sił do stanowiska obróbki za pomocą robota - 1 szt.


Przedmiotem tego stanowiska jest robot firmy szwedzkiej ABB (podobnie jak opisana wcześniej Delta). Jak większość opisanych wcześniej konstrukcji charakteryzuje się szeregowym łańcuchem kinematycznym. Cechą wyróżniającą go na tle robotów z pozostałych stanowisk jest zastosowany w nim sprzężony z układem sterowania czujnik siły, dzięki któremu możliwa jest aktywna kontrola wykonywanego przez robota zadania obróbczego. Na wyposażeniu stanowiska znajdują się również dwie wymienne końcówki robocze: standardowy chwytak i oraz wrzeciennik frezarski. Szczególnie ten drugi zasługuje na uwagę, a to ze względu na możliwości jakie oferuje. Pozwala on mianowicie na przeprowadzanie procesu frezowania i szlifowania za pomocą robota przemysłowego, a nie jak to zazwyczaj bywa, obrabiarki CNC.
Nauczenie pełnego wykorzystania funkcji oferowanych przez zamontowany czujnik nie nastręcza większych problemów, czemu sprzyja m.in praca w opanowanym wcześniej (w ramach zajęć z Deltą) środowisku programistycznym.
Zapoznanie studentów z tak odmiennym podejściem do zagadnienia obróbki skrawaniem jest bardzo istotne, szczególnie przy bardzo dynamicznie rozwijających się trendach w polskim przemyśle.
Zadaniem studentów jest zapoznanie się z możliwościami oferowanymi przez robota o takiej konfiguracji, tj. spawanie, malowanie czy chwytanie niezbyt dostępnych obiektów. Bardziej dociekliwi mają możliwość poznania bardziej złożonych funkcji sterujących, dzięki którym możliwe staje się zrealizowanie zadania paletyzacji.